::產(chǎn)品概述::
Freedom H5R/LW2 靈巧手
本靈巧手模仿人手的自由度分配及相關(guān)運(yùn)動(dòng)學(xué)參數(shù)進(jìn)行設(shè)計(jì)的靈巧手,整手的手指設(shè)計(jì)采用了模塊化的思想。

整機(jī)重量輕,單指指尖抓取力強(qiáng),五指靈巧手作為人體機(jī)器人或者機(jī)械臂末端操作工具,在工業(yè)生產(chǎn)的特殊環(huán)境中,對(duì)復(fù)雜形狀的物體進(jìn)行自適應(yīng)抓取,以及復(fù)雜任務(wù)的操作。該靈巧手,憑借指尖末端多陣列壓力傳感器,可高精度地執(zhí)行多種抓取操作。使五指靈巧手可以智能完成大部分的人體手部抓取動(dòng)作。除了開(kāi)啟抓取和操作任務(wù)的全新領(lǐng)域之外,該五指靈巧手還為在五指機(jī)械手的常用手勢(shì)基礎(chǔ)上進(jìn)行人與機(jī)器人的交流開(kāi)創(chuàng)了無(wú)限可能。主要應(yīng)用于各高校、科研研究所、高科技公司以及殘疾人假肢手應(yīng)用等行業(yè)的深度研究和開(kāi)發(fā)融合。
技術(shù)特征:
五指靈巧手采用5指設(shè)計(jì),混合傳動(dòng)的方式,其中拇指3個(gè)自由度(旋轉(zhuǎn),側(cè)擺,彎曲),食指2個(gè)自由度(側(cè)擺,彎曲),中指2個(gè)自由度(側(cè)擺,彎曲),無(wú)名指1個(gè)自由度(彎曲),小拇指1個(gè)自由度(彎曲)共9自由度,可達(dá)到完美模擬人手。指尖配置多陣列觸覺(jué)傳感器,主控板收集采傳感器數(shù)據(jù),通過(guò)力控算法可以實(shí)時(shí)感知抓握力度,可高精度地執(zhí)行多種抓取操作,使五指機(jī)械手實(shí)現(xiàn)智能抓取。五指靈巧手可以完成大部分的人體手部抓取動(dòng)作和常用的人體的手勢(shì)動(dòng)作。開(kāi)啟抓取和操作任務(wù)和機(jī)器人手勢(shì)交流的全新領(lǐng)域。
1.1 技術(shù)指標(biāo)
連桿靈巧機(jī)械手有左手和右手兩種版本。使用12V直流供電,適合移動(dòng)應(yīng)用。通過(guò)定義的接口可輕松連接市場(chǎng)中標(biāo)準(zhǔn)的工業(yè)機(jī)器人和輕型機(jī)器人。?
指標(biāo) | 參數(shù) | 指標(biāo) | 參數(shù) |
名稱(chēng) | 五指靈巧手 | 響應(yīng)速度 | 1ms |
自由度 | 9 | 凈重 | 875g±10g |
額定電流 | 5A | 額定電壓 | 12V |
額定功率 | 60W | 額定負(fù)載(單指/四指抱拳) | 3kg/10kg |
通信接口 | /RS485/CANFD | 額定負(fù)載下速度 | 90度/0.8s |
觸覺(jué)傳感位置 | 指尖,手掌(選配) | 觸覺(jué)反饋 | 16點(diǎn)陣列壓力傳感器 |
觸覺(jué)傳感器范圍 | 0-3N(單點(diǎn)) | 位置反饋 | 支持 |
2 設(shè)備安裝
主要內(nèi)容
該章主要描述靈巧手設(shè)備安裝
l?設(shè)備配件
l?設(shè)備連接
2.1 設(shè)備附件
五指靈巧手設(shè)備附件主要包括:USB轉(zhuǎn)串口、電源適配器、WIFI模塊(可選配)。
1.?USB轉(zhuǎn)串口:
圖. 3-1?USB轉(zhuǎn)串口
?
2.?電源:采用直流12V開(kāi)關(guān)電源適配器作為工作電源。? ?

圖. 3-2?電源
3、Wif模塊:WIFI模塊,實(shí)現(xiàn)無(wú)線(xiàn)傳輸(可選配)。
4、安裝底座及固定螺絲:可根據(jù)客戶(hù)要求進(jìn)行尺寸設(shè)計(jì)和定制。
2.2 設(shè)備連接
2.2.1 接口定義
通信接口在靈巧手底部,接口定義如圖3-3所示
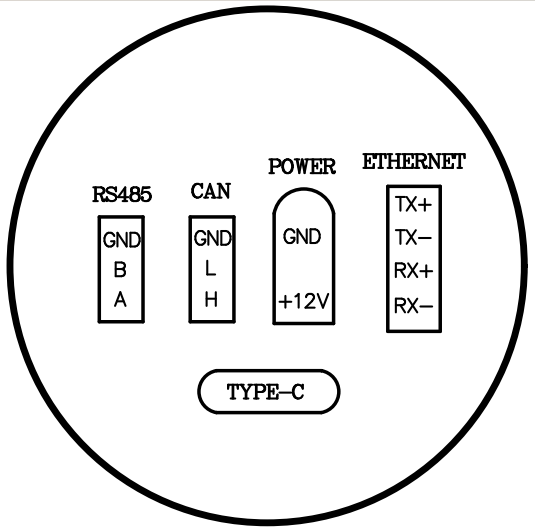
圖3-3接口定義
2.2.2 連接示意
靈巧手連線(xiàn)圖如下圖3-4所示:

圖. 3-4設(shè)備連接示意圖?
3 機(jī)械結(jié)構(gòu)
主要內(nèi)容
該章主要描述靈巧手機(jī)械結(jié)構(gòu)
l?外觀尺寸
l?自由度詳解
l?觸覺(jué)傳感器
3.1
外觀尺寸
五指靈巧手模仿人手的自由度分配及相關(guān)運(yùn)動(dòng)學(xué)參數(shù)進(jìn)行設(shè)計(jì)的靈巧手,整手的手指設(shè)計(jì)采用了模塊化的思想,整手尺寸高222mm,寬度為124mm,厚度142mm,重約875g。外觀圖如下所示:
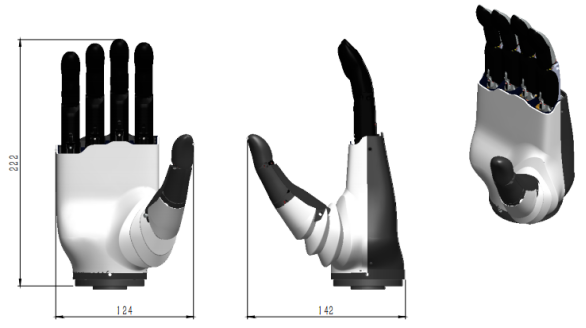
圖 4-1靈巧手外觀尺寸
3.2 自由度詳解
靈巧手具備9個(gè)主動(dòng)自由度
拇指旋轉(zhuǎn):拇指整體向食指方向側(cè)向運(yùn)動(dòng),運(yùn)動(dòng)角度范圍0°到90°
拇指?jìng)?cè)擺:拇指整體靠近掌心運(yùn)動(dòng)為正,掌心方向?yàn)樨?fù),運(yùn)動(dòng)角度范圍-45°到45°
拇指彎曲:拇指第三指節(jié)向內(nèi)測(cè)彎曲,運(yùn)動(dòng)角度范圍0°到90°
食指?jìng)?cè)擺:食指可以向拇指方向進(jìn)行側(cè)擺角度范圍0到10°,食指也可以向中指方向進(jìn)行側(cè)擺角度范圍0°到-10°
中指?jìng)?cè)擺:中指可以向食指方向進(jìn)行側(cè)擺角度范圍0到10°,中指也可以向=無(wú)名指方向進(jìn)行側(cè)擺角度范圍0°到-10°
無(wú)名指和小拇指第2和3直接是耦合運(yùn)動(dòng)的角度運(yùn)動(dòng)范圍0°到90°
3.2.1 大拇指
拇指旋轉(zhuǎn)示意圖如圖4-2以及4-3所示:

圖4-2
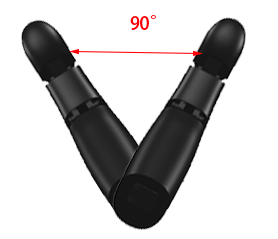
圖4-3
拇指?jìng)?cè)擺示意圖如圖4-4所示
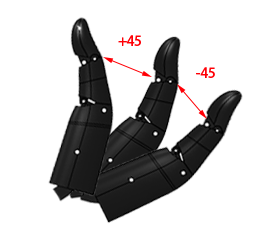
圖4-4
拇指彎曲示意圖如圖4-5所示
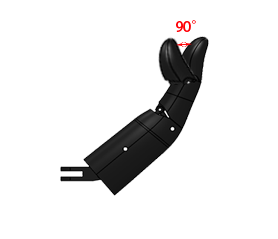
圖4-5
3.2.2 食指和中指
食指和中指分別具有兩個(gè)自由度,側(cè)擺和彎曲側(cè)擺動(dòng)如圖4-6所示彎曲如圖4-7所示
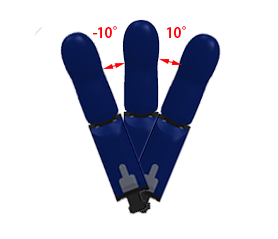
圖4-6
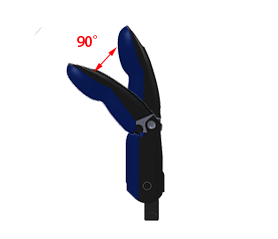
圖4-7
3.2.3 無(wú)名指小拇指
無(wú)名指小拇指只有彎曲角度,彎曲角度示意參考圖4-7
3.3 觸覺(jué)傳感器
觸覺(jué)傳感器采用靈敏度高弛豫時(shí)間低的柔性壓敏材料、穩(wěn)定性高的“柔性-非柔性”界面過(guò)渡材料、彈性好機(jī)械強(qiáng)度高的柔性包覆與支撐材料、節(jié)點(diǎn)間的柔性(非撓性)互連材料為主要本體材料,同時(shí)結(jié)合CMOS工藝技術(shù),通過(guò)在CMOS觸覺(jué)傳感器讀出芯片基底上沉積聚合物材料,實(shí)現(xiàn)復(fù)合傳感結(jié)構(gòu),構(gòu)成單片的觸覺(jué)傳感單元(即節(jié)點(diǎn));并采用柔性技術(shù)實(shí)現(xiàn)傳感單元間的互連與信號(hào)讀出。首先采用彈性好、可塑性強(qiáng)的聚二甲基硅氧烷聚合物作為基材,碳納米管作為壓敏性復(fù)合材料的導(dǎo)電填料,合成具有壓阻特性的新型力敏復(fù)合材料,制備成具有良好的柔性、抗疲勞性強(qiáng)、動(dòng)態(tài)范圍大、陣列單元多等特點(diǎn)的陣列式柔性觸覺(jué)傳感器。然后將觸覺(jué)傳感器、超寬動(dòng)態(tài)范圍的讀出電路、階梯式分辨率的傳感器接口電路、信號(hào)處理主芯片進(jìn)行集成組成完整的傳感系統(tǒng)。
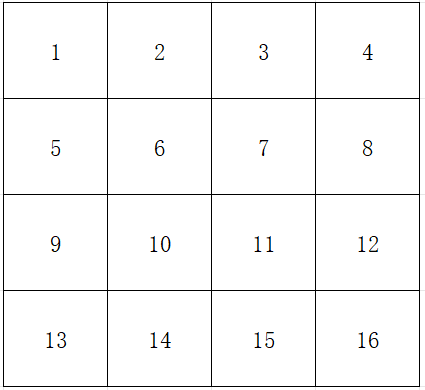
指尖觸覺(jué)傳感器設(shè)計(jì)上下面電極為“四橫四縱”形式,從而將整塊壓敏材料自動(dòng)分割成4×4矩陣形式具有16個(gè)陣列點(diǎn),即16個(gè)壓阻單元,其單元位置及編號(hào)示意圖如圖4-8所示;靈巧手手指?jìng)鞲衅鲗?shí)物抓取中實(shí)時(shí)返饋如4-9
 ? ? ? ?
? ? ? ?
圖. 4-8?
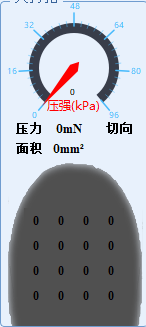
圖4-9
3.3.1 壓強(qiáng)/切向力/受力面積
觸覺(jué)傳感器可以通過(guò)計(jì)算得到單位面積收到的壓強(qiáng)值,單位是千帕,也可以根據(jù)觸覺(jué)傳感器的點(diǎn)云信息得到當(dāng)前物體收到的切向力方向,應(yīng)用軟件會(huì)將壓強(qiáng),切向力和受力面積顯示到圖4-9中。
4 軟件操作
主要內(nèi)容
該章主要描述設(shè)備的軟件操作
l?操作界面
l?通信配置
l?運(yùn)動(dòng)參數(shù)
l?控制
l?演示
l?曲線(xiàn)
4.1 操作界面
軟件啟動(dòng)后,軟件主頁(yè)面由通信設(shè)置、運(yùn)動(dòng)參數(shù),反饋信息,功能頁(yè)構(gòu)成。功能頁(yè)包括控制、演示、曲線(xiàn)。
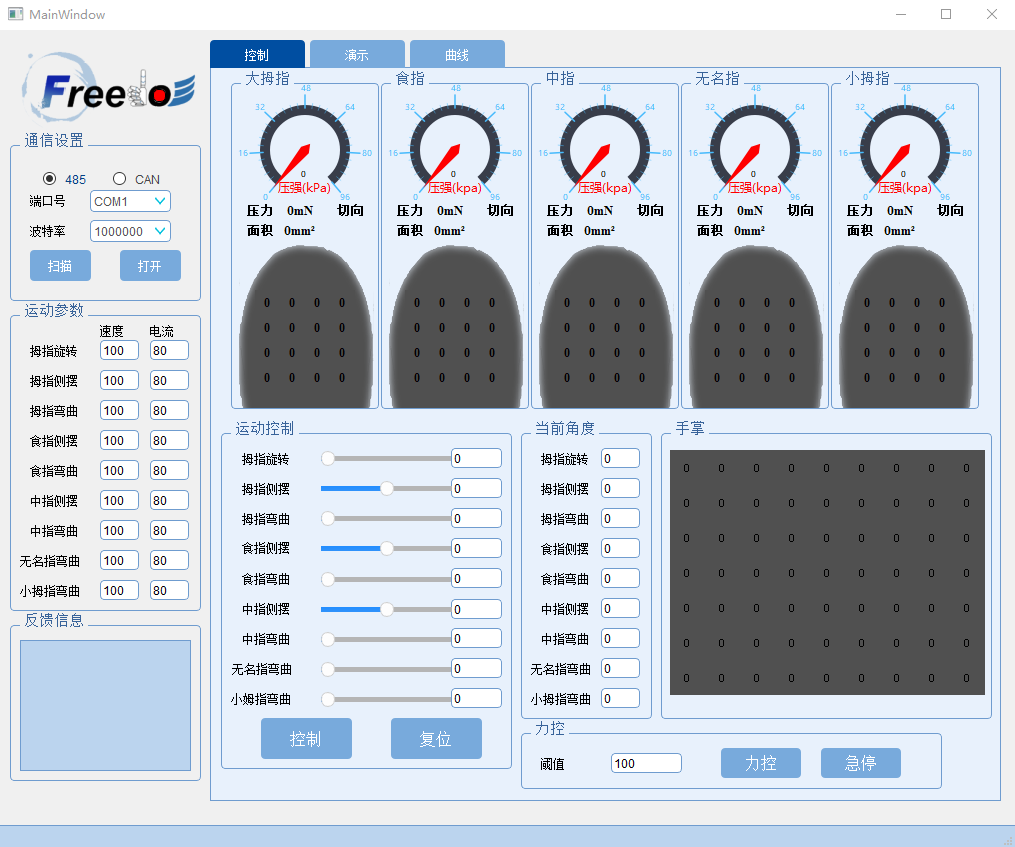
圖. 5-1?軟件主界面
4.2 通信設(shè)置
4.2.1 RS485
通信設(shè)置中的單選按鈕可以選擇當(dāng)前使用的通信方式485需要設(shè)置項(xiàng)為端口號(hào)和波特率
端口號(hào):可以從設(shè)備管理器中查詢(xún),端口號(hào)參考圖5-2所示括號(hào)內(nèi)部的為端口號(hào)
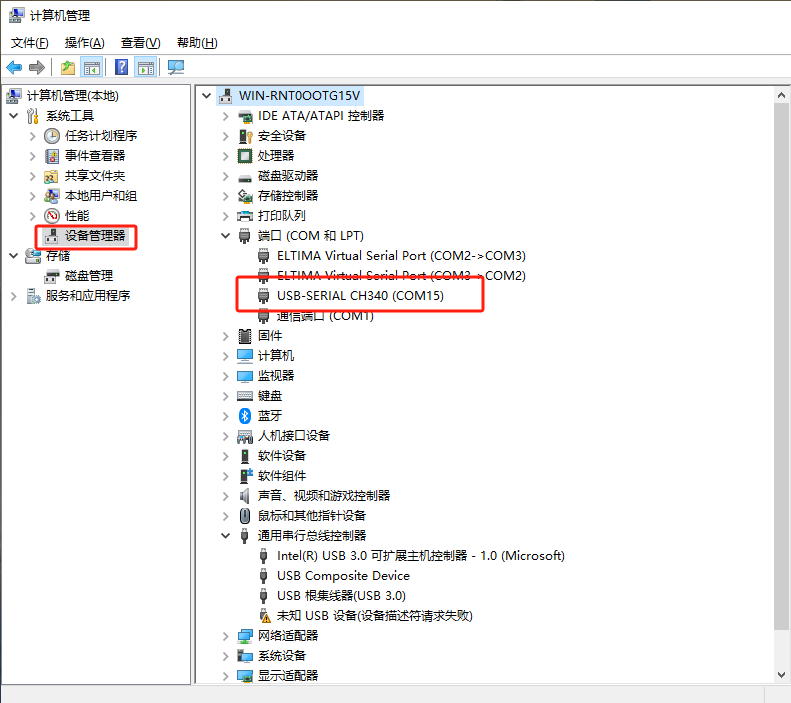
圖5-2
波特率:出廠(chǎng)默認(rèn)波特率是115200,可以通過(guò)通信設(shè)置軟件進(jìn)行修改,修改過(guò)程如圖5-3所示,點(diǎn)擊修改之前可以選擇波特率以及修改ID值

圖5-3
4.2.2 CANFD
選擇CAN單選框后會(huì)出現(xiàn)兩個(gè)波特率選擇,下面的波特率為數(shù)據(jù)波特率一般默認(rèn)波特率為1M數(shù)據(jù)波特率為2M,本靈巧手控制軟件支持CANFD設(shè)備如圖5-4所示
圖5-4
4.3 運(yùn)動(dòng)參數(shù)
運(yùn)動(dòng)參數(shù)可以分別設(shè)置靈巧手9個(gè)自由度的速度,電流,如圖5-5
速度范圍1-100(速度百分比)
電流范圍15-150,對(duì)應(yīng)電流值150-1500 (單位毫安)
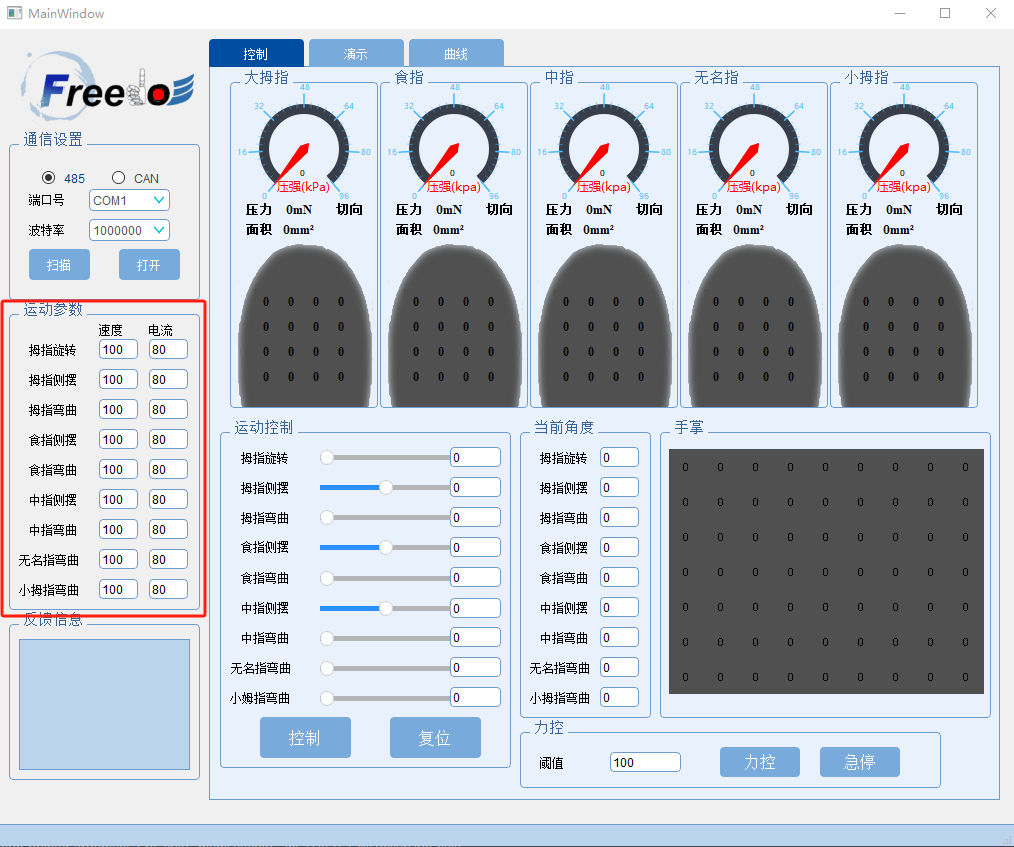
圖5-5
4.4 控制
靈巧手運(yùn)動(dòng)控制功能頁(yè)分為手指?jìng)鞲衅黠@示、手掌傳感器顯示、運(yùn)動(dòng)控制、當(dāng)前角度、力控,5部分組成。
4.4.1 運(yùn)動(dòng)控制
通過(guò)滑塊或者數(shù)值輸入調(diào)整各個(gè)運(yùn)動(dòng)關(guān)節(jié)需要發(fā)送的數(shù)值后,點(diǎn)擊控制按鈕即可根據(jù)設(shè)定的關(guān)節(jié)角度進(jìn)行控制,點(diǎn)擊復(fù)位所有關(guān)節(jié)回到初始化狀態(tài)。操作區(qū)域如圖5-6所示
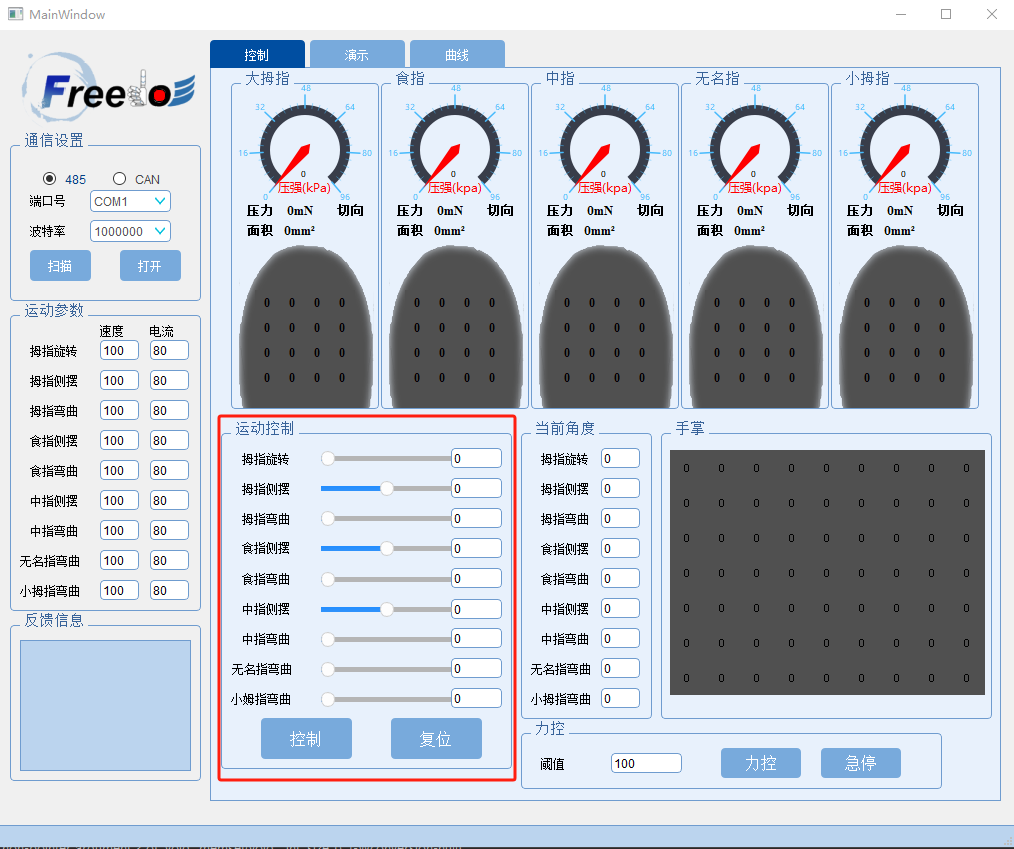
圖. 5-6?
4.4.2 當(dāng)前角度
通信連接后靈巧手發(fā)聵的角度信息會(huì)在圖5-7紅框區(qū)域中的控件上進(jìn)行顯示
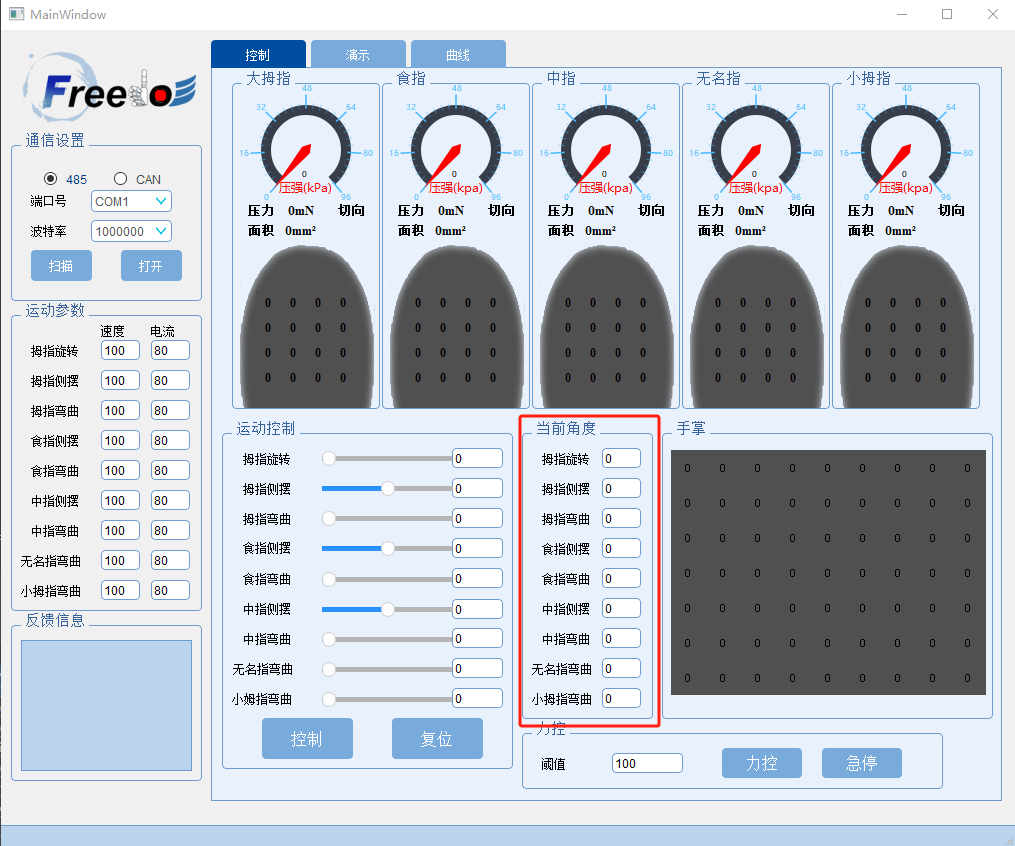
圖5-7
4.4.3 傳感器顯示
圖5-8兩個(gè)紅框區(qū)域?yàn)閭鞲衅黠@示區(qū)域,顯示內(nèi)容包括壓強(qiáng)(千帕),壓力(毫牛),受力面積(平方毫米),按壓區(qū)域點(diǎn)位分布。

圖5-8
4.4.4 傳感器力控
力控功能需要先進(jìn)行力控閾值設(shè)定,閾值單位為千帕,設(shè)定范圍為5-150。
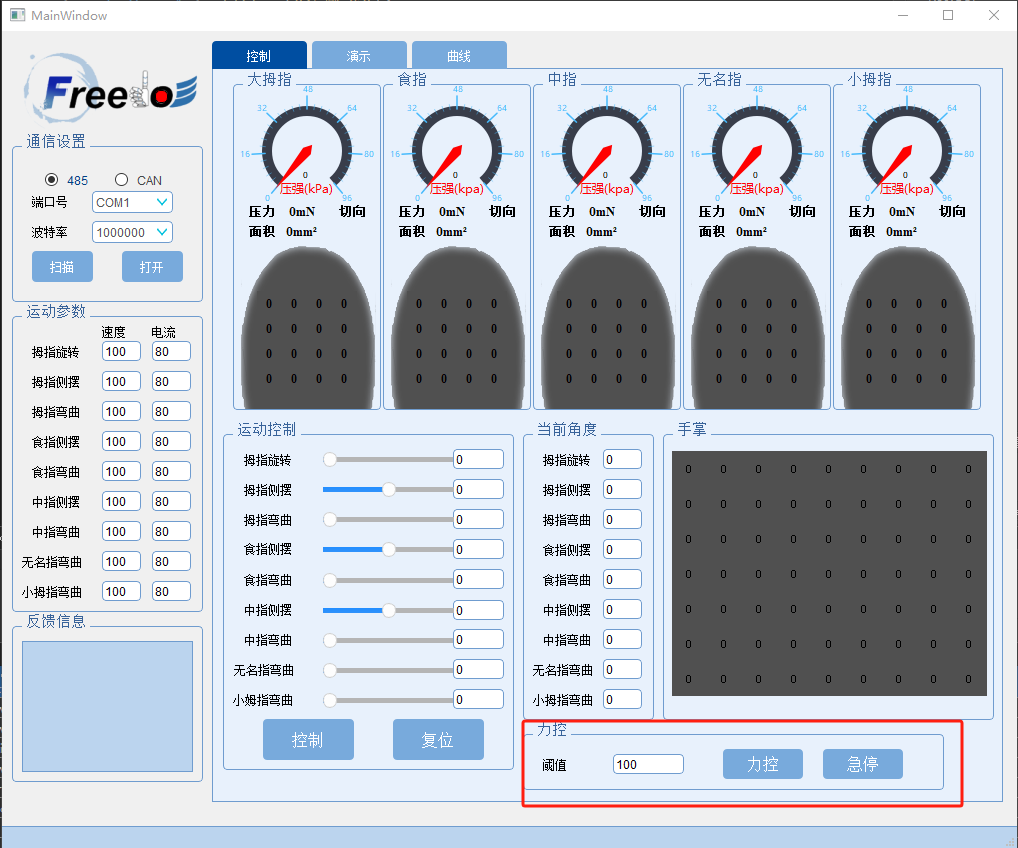
圖5-9
4.5 演示
演示功能頁(yè)分為快捷演示,循環(huán)演示,力控演示,以及動(dòng)作序列表幾部分組成。如圖5-10所示

圖5-10
4.5.1 快捷演示
常用指令面板:分別點(diǎn)擊1、2、3、4、5、6、7、8、9、拳、OK、贊,可以對(duì)上述動(dòng)作進(jìn)行快速的演示。
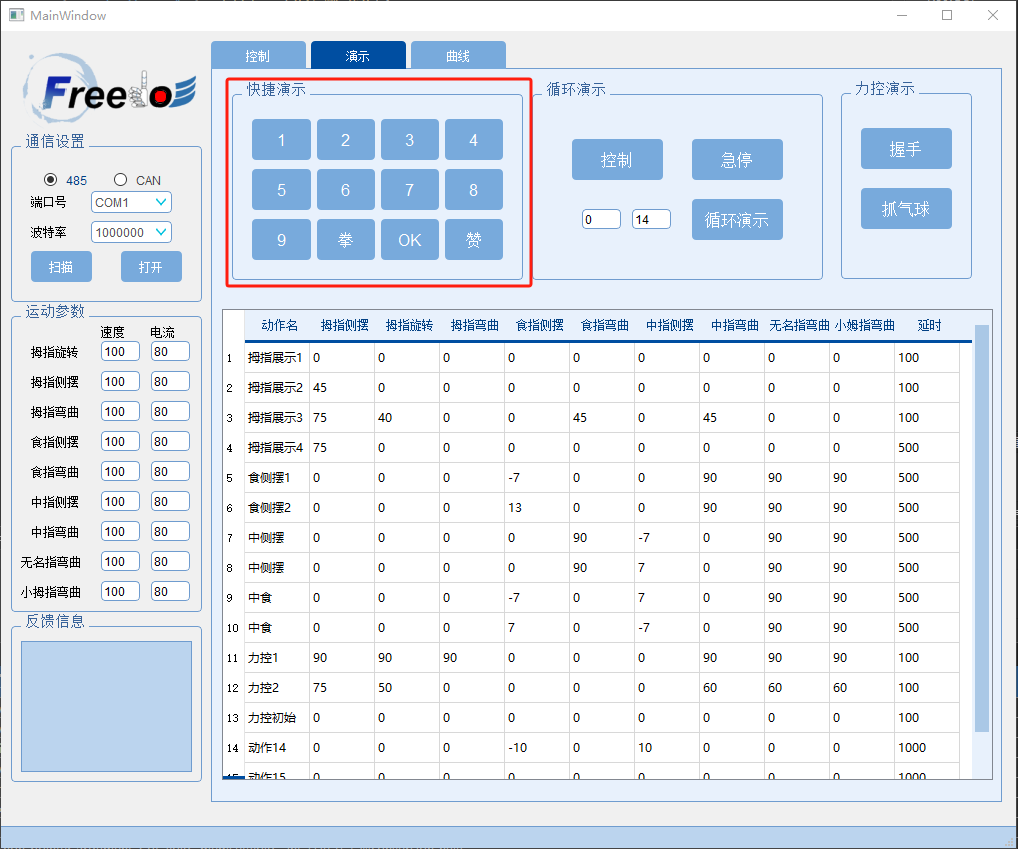
圖. 5-11?
4.5.2 循環(huán)演示
循環(huán)演示按鈕前面的兩個(gè)參數(shù)對(duì)應(yīng)列表的行數(shù),循環(huán)演示功能是從列表兩個(gè)行號(hào)的內(nèi)的動(dòng)作序列進(jìn)行循環(huán)演示。可以通過(guò)雙擊表格內(nèi)的單元格進(jìn)行修改按回車(chē)進(jìn)行保存。操作區(qū)域如圖5-12所示。

圖. 5-12?
4.5.3 電流力控
力控演示中握手以及抓氣球?yàn)殡娏髁胤绞綄?shí)現(xiàn)的,點(diǎn)擊握手后拇指會(huì)轉(zhuǎn)動(dòng)到一定角度其余四根手指緩緩彎曲。點(diǎn)擊松開(kāi)靈巧手先張開(kāi)然后拇指進(jìn)行轉(zhuǎn)動(dòng)。點(diǎn)擊抓氣球后拇指進(jìn)行轉(zhuǎn)動(dòng)后與食指和中指行程三指捏的姿態(tài),在運(yùn)動(dòng)期間放入氣球會(huì)重復(fù)進(jìn)行捏,松,捏的邏輯。操作區(qū)域見(jiàn)5-13

圖5-13
4.6 曲線(xiàn)
曲線(xiàn)顯示功能頁(yè)包括,顯示設(shè)置,曲線(xiàn)顯示區(qū)域以及多條曲線(xiàn)勾選顯示。顯示設(shè)置中分為類(lèi)型選擇和部位選擇,類(lèi)型選擇提供可選擇項(xiàng)包括傳感器、壓強(qiáng)、電流,部位選擇,如果類(lèi)型選擇是傳感器和壓強(qiáng),部位選擇分為大拇指,食指,中指,無(wú)名指,小拇指,手掌1-7行,類(lèi)型選擇是電流,部位選擇分為大拇指,食指,中指,無(wú)名指,小拇指。操作界面如圖5-14所示
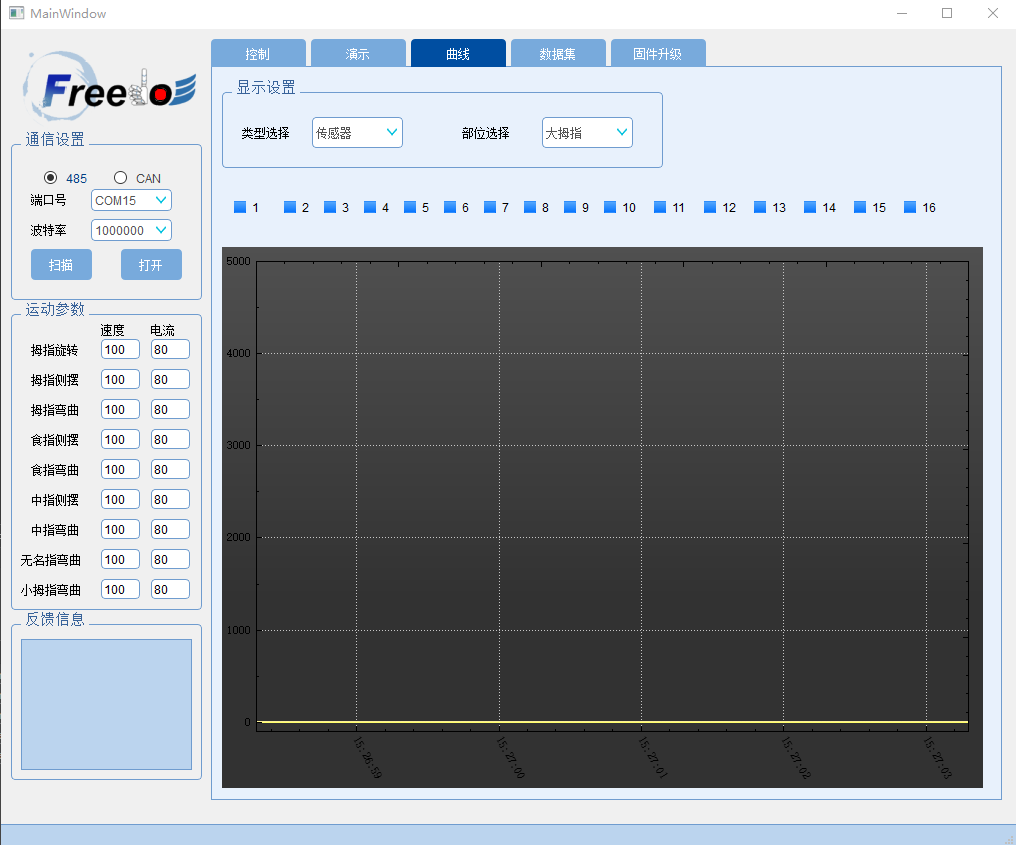
圖5-14
5 產(chǎn)品維護(hù)
主要內(nèi)容
該章主要描述靈巧手產(chǎn)品維護(hù)
l?機(jī)械維修
l?電氣維護(hù)
5.1
機(jī)械維護(hù)
1.機(jī)械磨損:需要定期檢查磨損情況。在長(zhǎng)期使用過(guò)程中主要有以下幾類(lèi)磨損。
部件斷裂損壞:由于承載很高的載荷,導(dǎo)致運(yùn)動(dòng)部件損壞失效,此類(lèi)故障需要技術(shù)支持人員進(jìn)行修復(fù),更換運(yùn)動(dòng)部件。
2.指尖脫落:
指尖包覆觸覺(jué)傳感器的硅膠層在長(zhǎng)時(shí)間抓取過(guò)程中容易脫膠脫落,此類(lèi)故障需要技術(shù)支持人員進(jìn)行修復(fù),更換硅膠包覆層。
5.2 電氣維護(hù)
1.觸覺(jué)傳感器故障
觸覺(jué)傳感器壓電層使用了FSR壓敏材料,該傳感器容易發(fā)生的故障仍然為數(shù)據(jù)采集線(xiàn)松動(dòng)的問(wèn)題,導(dǎo)致接觸不好。發(fā)生該故障后,需要技術(shù)人員更換傳感器。
2.觸覺(jué)傳感器無(wú)數(shù)據(jù)
觸覺(jué)傳感器數(shù)據(jù)走線(xiàn)在手指狹小的空間經(jīng)過(guò)多次軸纏繞,在長(zhǎng)時(shí)間運(yùn)動(dòng)控制過(guò)程中細(xì)小的數(shù)據(jù)線(xiàn)可能會(huì)壓斷失去通訊。發(fā)生該故障后,需要技術(shù)人員拆卸更換通訊線(xiàn)。
5.3 注意事項(xiàng)?
1.?使用前先閱讀用戶(hù)手冊(cè),對(duì)產(chǎn)品有一個(gè)大概的了解。
2.?靈巧手本身帶有斷電記憶位置功能,所以每個(gè)手指是鎖定狀態(tài),切記不能用力掰動(dòng)手指。
3.?進(jìn)行靈巧手手控制時(shí)需要注意,執(zhí)行拇指旋轉(zhuǎn)后,拇指與食指進(jìn)行彎曲操作要進(jìn)行小角度人為判斷是否會(huì)出現(xiàn)干涉,不能直接運(yùn)行沒(méi)有進(jìn)行實(shí)驗(yàn)的彎曲角度值。
4.?修改力控角度時(shí)需要注意,拇指旋轉(zhuǎn)角度非0的情況下,拇指與食指彎曲角度設(shè)定值需要進(jìn)行人為判斷是否會(huì)出現(xiàn)干涉,不能直接設(shè)定
5.?不能進(jìn)行私自拆解操作,否則不提供售后服務(wù)
6.?如需將手安裝置機(jī)械臂或執(zhí)行器末端,應(yīng)避免觸碰損壞
5.4 保修條例
承蒙惠購(gòu)本公司的產(chǎn)品。謹(jǐn)致謝意!為了保護(hù)您的合法權(quán)益,同時(shí)為改善對(duì)客戶(hù)的售后服務(wù),特制定本保修條例。
1、本產(chǎn)品自購(gòu)買(mǎi)之日起免費(fèi)保修一年,終身維護(hù),但零附件不屬于免費(fèi)保修范圍之內(nèi)。
2、在免費(fèi)保修期內(nèi),發(fā)生如下情況公司有權(quán)拒絕保修服務(wù)而酌情收取維修元件費(fèi)用和服務(wù)費(fèi)用。
a)?用戶(hù)使用不當(dāng)或者錯(cuò)誤操作導(dǎo)致產(chǎn)品損壞;
b)?安裝不當(dāng)、人為掰壞或者碰撞其它物體導(dǎo)致的損壞情況 ;
c)?未經(jīng)授權(quán)而擅自拆開(kāi)設(shè)備進(jìn)行維修的。
3、送修產(chǎn)品請(qǐng)妥善包裝運(yùn)送,運(yùn)送過(guò)程如有破損或遺失,本公司恕不負(fù)責(zé)。
本公司保留最終解釋權(quán),如有修改恕不另行通知。
::資料下載::
Freedom H5R/LW2 靈巧手




























































