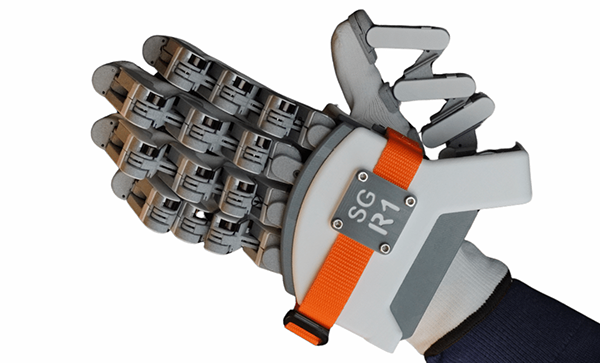
專為遠程遙操作機器人設(shè)計的觸覺手套
SenseGlove R1(原名“Project Rembrandt”)專為人形機器人靈巧手的無縫控制而設(shè)計,R1融合了主動力反饋、精確力控制、毫米級精度手指跟蹤和振動觸覺反饋多種功能。非常適用于觸覺感知和遠程操作模仿學習等場景應(yīng)用。
產(chǎn)品特點:
為機器人遙操作和訓練提供無與倫比的控制、真實感和適應(yīng)性?
1.具有實時壓力傳感的主動力反饋
高速1kHz控制回路可將機器人施加的力實時傳遞給控制機器人的用戶。例如,當您輕輕地拿起一個易碎的物體時,手套會立即調(diào)整以復制這種微妙的抓握力,確保精確度和安全性。實時壓力傳感確保對物體的大小、硬度和阻力做出動態(tài)響應(yīng),這有助于增強操作精度。
2.手指跟蹤的毫米級準確度和精度
R1能夠?qū)θ课鍌€手指進行準確、可靠的手指跟蹤。使您自信輕松地執(zhí)行復雜的任務(wù),如微組件組裝或精密維護等操作。
3.振動觸覺反饋
動態(tài)振動模式提供關(guān)于接觸位置、紋理和強度的即時反饋。用戶將能夠感受光滑表面和粗糙表面之間的差異,或者在虛擬手指與物體互動時收到即時警報——所有反饋都是實時的。
產(chǎn)品優(yōu)勢:
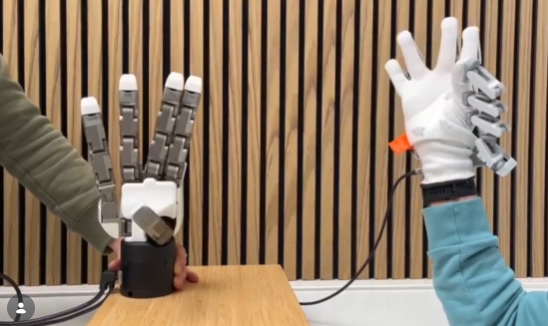
像控制自己的手一樣控制機器人靈巧手
靈活部署
可以單獨使用,也可以安裝在觸覺機械臂上——適用于任何設(shè)置。
輕松收集數(shù)據(jù)
利用收集到的數(shù)據(jù)訓練機器人完成抓取任務(wù),帶有力感知的模仿學習過程將更加擬人。
無縫平臺集成
無縫集成ROS和Python SDKs。可高效地將R1集成到您的系統(tǒng)中。
支持定制化
定制您的手套,支持根據(jù)您的目標和要求量身定制手套的特定功能。


































































